|
ICME
CME 2012 Conference
Plenary Talk 6
Biomimetic Visual Sensors and Autopilots: Lessons from Insects
Nicolas Franceschini, Ph.D.
Emeritus Directeur de Recherche CNRS
Institute of Movement Science
Biorobotics Laboratory
CNRS and Aix-Marseille University
F, 163 Avenue du Luminy (CP938), 13288, MARSEILLE (France)
E-mail: nicolas.franceschini@univmed.fr

Abstract:
The insect compound eye is a masterpiece of micro-optics, optronics, neuronics and
nanomechatronics. It has already given rise to major applications such as anti-reflection coatings
(used on TV screens and solar cells), polarization-keeping optical fibers (used in microscopes),
tandem photodetectors (used in target trackers), graded index (GRIN) lenses and GRIN optical fibers
(used in medical endoscopes), optical auto-leveling systems and polarization compasses (used on
aircraft), X-ray telescopes, etc. The insect compound eye (facet eye) displays crystalline structures at
various scales, from the nano to the meso range: honeycomb structure in the facet array, in the corneal
nipple array, in the photoreceptor mosaic, in the (visual pigment bearing) microvilli, and in the neural
array driven by the photoreceptor cells’ signals. Insects use their two compound eyes for immediate
action upon the steering. Despite their coarse visual system (only 102 to 104 pixels) and their
minimalist number of neurons (< 106), insects are able to navigate in 3D, avoiding obstacles, fixating
and tracking other insects and landing gracefully…From the results of our micro-optical,
electrophysiological and behavioral studies on insect vision, we have developped several biomimetic
visual sensors and aerial robots. The 100-gram robot OCTAVE, for example, is able to avoid the
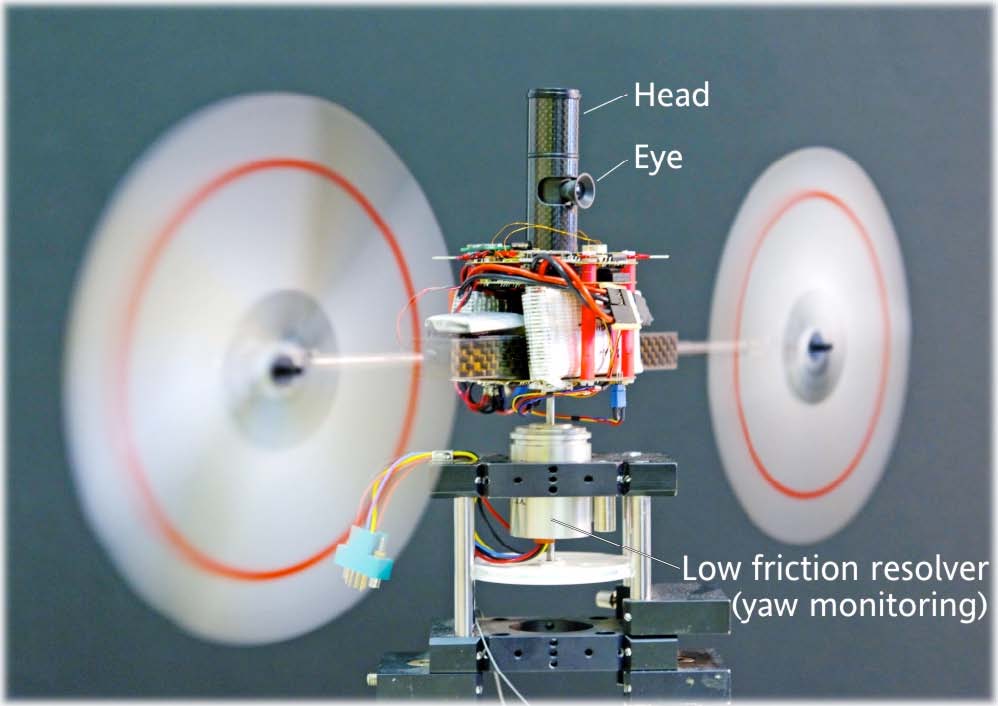
ground, react to wind and land autonomously. The robot OSCAR is able to track a moving edge with
hyperacute resolution (that is, with a resolution far better than the « static resolution » calculated from
the interreceptor angle), and suggests how an animal visual system may contribute to stabilize the
gaze accurately in order to guide navigation in the presence of disturbances such as gusts of wind.
|